О компании  | Новости  | Каталог  | Прайс-лист  | Статьи  | Тех. поддержка  | Документация  | Контакты  |



Тел: +7 (800) 333-16-76
Тел: +7 (812) 622-05-40
Тел: +7 (812) 716-42-16
Тел: +7 (495) 215-22-76
Факс: +7 (812) 622-05-40
Главная / Статьи / Электропривод на базе шагового двигателя
Электропривод на базе шагового двигателя
Шаговые двигатели - электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. Характер движения ротора шагового двигателя определяется частотой и характером изменения управляющих импульсов. Шаговые двигатели получили широкое распространение благодаря их техническим особенностям:
- Отработка точных перемещений
- Совместимость с цифровыми устройствами управления, в том числе промышленными контроллерами, а также персональным компьютером
-
Легкая и высокоточная установка скорости
Отсутствие необходимости в обратной связи - Высокое развиваемое ускорение
- Ненакопительная ошибка позиционирования
- Хорошая нагрузочная характеристика (соотношение крутящий момент/скорость )
- Возможность удерживать нагрузку в стационарном положении без перегрева двигателя
- Широкий диапазон рабочих скоростей
Шаговые двигатели находят широкое применение в различном оборудовании:
- Приборы точной механики и оптики
- Измерительные приборы, в том числе спектрометры, газоанализаторы, приборы для анализа нефтепродуктов; оборудование для отбора проб; приборы для контроля качества зерна, муки и т. д.
- Дозаторы и питатели
- Перемешивающие устройства
- Робототехника
- Стрелочные приборы (спидометры, тахометры, комбинации, часы) для автоэлектроники, летных тренажеров и т. п.
- Спектрометры
- Медицинское и лабораторное оборудование
- Координатные и поворотные столы
- Приводы ЧПУ - фрезерные, гравировальные, шлифовочные, электроэррозионные станки, комплексы лазерной, плазменной, газовой резки.
- Приводы исполнительных механизмов конвейерных систем
- Упаковочное, фасовочное, сортировочное, этикеровочное оборудование
- Вязальное, вышивальное оборудование
- Оборудование для намотки
- Полиграфические автоматы
- Морские радиолокационные и гидроакустические станции
- Светотехническое оборудование
- Дисководы, факсимильные аппараты, принтеры, сканеры, копировальные машины, а также различная бытовая техника
- Теплотехника
- Приводы для систем безопасности - турникеты, поворотные камеры
- Специальное технологическое оборудование
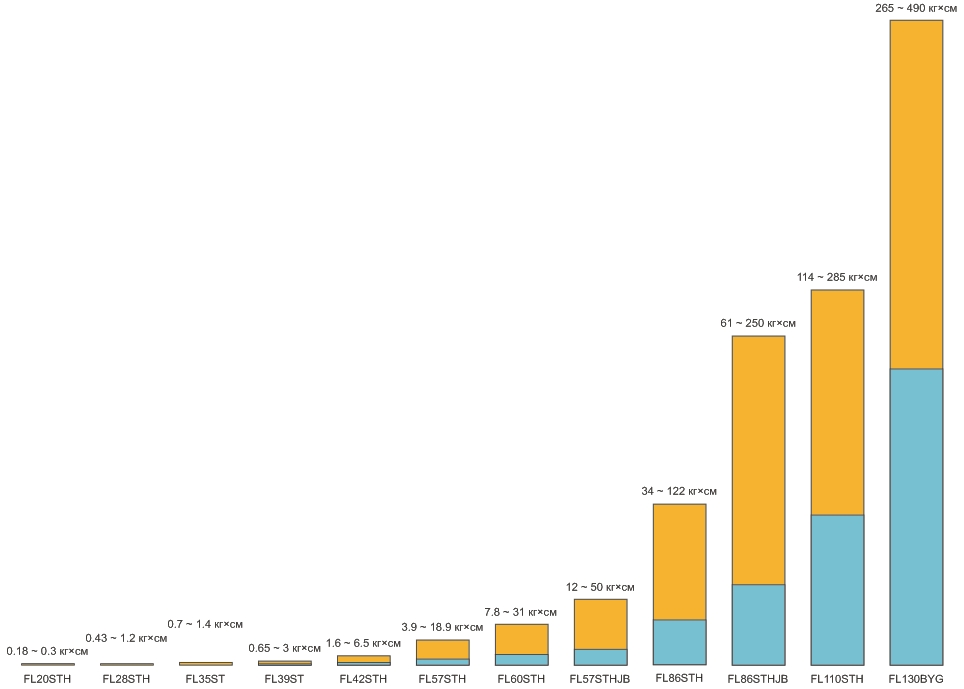
Мощность шагового электропривода варьируется в широких пределах, что обуславливает его применение для широкого класса задач. Максимальный крутящий момент, развиваемый шаговым двигателем в квазистатическом режиме, составляет 49 Н×м
Как правило, работой шагового двигателя управляет электронная схема, а питание его осуществляется от источника постоянного тока. Шаговые двигатели применяют для управления частотой вращения без применения дорогого контура обратной связи. Этот привод используется в приводе с разомкнутой цепью.
Управление без обратной связи хотя и является экономически выгодным, но имеет и ряд ограничений. Например, поворот ротора становится колебательным и нестабильным по значению конечных скоростей, вследствие чего характеристики движения, частота вращения и ускорение шагового двигателя с управлением без обратной связи не могут быть такими же точными, как у двигателей постоянного тока с обратной связью. Следовательно, уменьшение колебаний - это основная проблема, которую необходимо разрешить для расширения границ применения шаговых двигателей.
Наиболее важной особенностью шагового двигателя является то, что на каждый импульс управления ротор поворачивается на фиксированный угол, значение которого в градусах называется шагом. При получении команды логическая цепь определяет, какая фаза должна быть задействована и посылает сигнал управления на инвентор, определяющий значение тока шагового двигателя. Логическая схема обычно монтируется из транзисторных элементов или интегральных схем. Если выходной потенциал логической схемы высокий, возбуждается соответствующа фаза обмотки, например, фаза 1. Если выходной потенциал низкий, фаза обмотки с этим номером отключается. Двигатель вращается по часовой стрелке при управляющей последовательности 1 > 2 >3 >1 ..., направление против часовой стрелки реализуется при обратной последовательности 1 > 3 > 2 > 1 ... При этом заранее оговаривается, каким в данных условиях считать направление вращения по часовой стрелке. Фазы обмотки обозначаются как 1,2,3 (4 - для четырехфазных двигателей) и т.д. либо A и B для некоторых двухфазных двигателей.
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные электрические машины, они имеют высокую надежность и большой срок службы, что позволяет использовать их в индустриальных применениях. По сравнению с обычными электродвигателями постоянного тока, шаговые двигатели требуют сложных схем управления, которые должны выполнять все коммутации обмоток. Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. Если нагрузка на ротор ШД превысит крутящий момент, то информация о положении ротора теряется и система потребует базирования с помощью, например, концевого выключателя или другого датчика.
При проектировании конкретных систем приходится делать выбор между сервоприводом и шаговым приводом. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый привод является наиболее экономичным решением.
Задачи, решаемые при помощи шагового привода, разнообразны. Шаговые двигатели устанавливаются в устройствах и механизмах, требующих высокой надежности и точности. Конструкция шагового двигателя такова, что в ней отсутствуют изнашивающиеся детали. Рассмотрим некоторые типичные применения шагового привода.
Электроприводы шаговых двигателей для транспортных систем
Основные требования, предъявляемые к электродвигателям, используемым в транспортерах:
- Низкий уровень вибрации
- Точность/повторяемость останова
- Способность работать в запыленных, влажных и т. п. средах
- Параметры разгона/торможения
В качестве приводов транспортных систем традиционно используются шаговые двигатели и двигатели переменного тока (сервоприводы).
| Конвейер | Реверсивный конвейер | Конвейерные системы | Ременной транспортер |
 |
|
 |
 |
| Элеватор | Лабораборное оборудование | Зубчатая рейка | Транспортер |
 |
 |
 |
 |
| Промывочный конвейер | Использование датчиков позиционирования | Системы автоматизации | Дискретный транспортер |
 |
 |
 |
 |
Шаговый привод для линейных перемещений
| Координатный стол | Координатный стол |
 |
 |
Шаговый двигатель для поворотных операций
Основные требования, предъявляемые к электродвигателям, используемым в транспортерах:
- Разрешающая способность электромеханической системы
- Точность останова
В качестве приводов для поворотных операция традиционно используются шаговые двигатели и двигатели переменного тока (сервоприводы)
| Поворотный стол | Поворотный стол | Поворотная камера |
 |
 |
 |
Намоточное оборудование
В качестве приводов для операций намотки традиционно используются шаговые двигатели и двигатели переменного тока (сервоприводы)
| Намотка | Намотка |
 |
 |